




LaserAnalyse en verwerking van signalen voor spraakdetectie op afstand
Het decoderen van signaalruis: signaalanalyse en -verwerking van lasergestuurde spraakdetectie.
In de wonderlijke wereld van de technologie is spraakdetectie op afstand met lasertechnologie als een prachtige symfonie, maar deze symfonie heeft ook zijn eigen "ruis" – signaalruis. Net als een onverwacht luidruchtig publiek bij een concert, is ruis vaak storend.laser spraakdetectieVolgens de bron kan de ruis bij lasergestuurde spraakdetectie op afstand grofweg worden onderverdeeld in ruis die wordt geïntroduceerd door het laserinstrument zelf, ruis die wordt geïntroduceerd door andere geluidsbronnen in de buurt van het meetdoel en ruis die wordt gegenereerd door omgevingsverstoringen. Spraakdetectie over lange afstand vereist uiteindelijk spraaksignalen die door het menselijk gehoor of door machines kunnen worden herkend. Veel gemengde ruis van de externe omgeving en het detectiesysteem vermindert de hoorbaarheid en verstaanbaarheid van de verkregen spraaksignalen. Bovendien valt de frequentiebandverdeling van deze ruis gedeeltelijk samen met de hoofdfrequentiebandverdeling van het spraaksignaal (ongeveer 300-3000 Hz). Deze ruis kan niet eenvoudig worden gefilterd met traditionele filters en verdere verwerking van de gedetecteerde spraaksignalen is nodig. Momenteel richten onderzoekers zich voornamelijk op het verwijderen van niet-stationaire breedbandruis en impactruis.
Breedbandachtergrondruis wordt over het algemeen verwerkt met behulp van methoden voor spectrumschatting op korte termijn, subruimtemethoden en andere ruisonderdrukkingsalgoritmen gebaseerd op signaalverwerking, evenals traditionele methoden voor machinaal leren, methoden voor deep learning en andere spraakverbeteringstechnologieën om zuivere spraaksignalen van de achtergrondruis te scheiden.
Impulsruis is de spikkelruis die kan ontstaan door het dynamische spikkeleffect wanneer de locatie van het detectiedoel wordt verstoord door het detectielicht van het LDV-detectiesysteem. Momenteel wordt dit type ruis voornamelijk verwijderd door de locatie te detecteren waar het signaal een hoge energiepiek heeft en deze te vervangen door de voorspelde waarde.
Lasergestuurde spraakdetectie op afstand heeft toepassingsmogelijkheden in vele gebieden, zoals interceptie, multimode monitoring, inbraakdetectie, zoek- en reddingsoperaties, lasermicrofoons, enz. Naar verwachting zal de toekomstige onderzoekstrend op het gebied van lasergestuurde spraakdetectie op afstand zich voornamelijk richten op: (1) het verbeteren van de meetprestaties van het systeem, zoals gevoeligheid en signaal-ruisverhouding, en het optimaliseren van de detectiemodus, componenten en structuur van het detectiesysteem; (2) het verbeteren van de aanpasbaarheid van signaalverwerkingsalgoritmen, zodat lasergestuurde spraakdetectietechnologie zich kan aanpassen aan verschillende meetafstanden, omgevingsomstandigheden en trillingsmeetdoelen; (3) een meer rationele selectie van trillingsmeetdoelen en hoogfrequente compensatie van spraaksignalen gemeten op doelen met verschillende frequentieresponskarakteristieken; (4) het verbeteren van de systeemstructuur en het verder optimaliseren van het detectiesysteem.
miniaturisatie, draagbaarheid en een intelligent detectieproces.
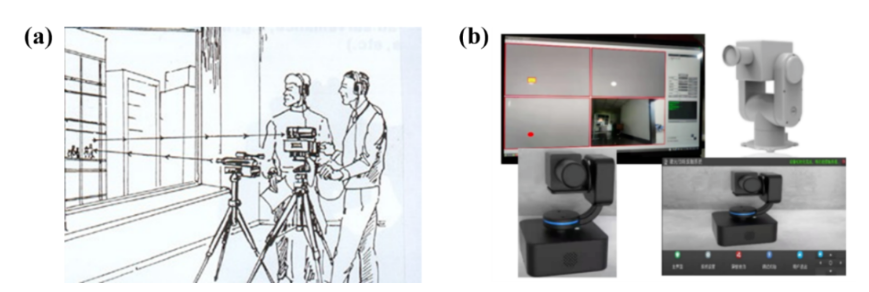
FIG. 1 (a) Schematisch diagram van laseronderschepping; (b) Schematisch diagram van het laser-anti-onderscheppingssysteem
Geplaatst op: 14 oktober 2024