




Lerenlaseruitlijningstechnieken
Het uitlijnen van de laserstraal is de belangrijkste taak van het uitlijningsproces. Dit kan het gebruik van extra optische componenten zoals lenzen of vezelcollimatoren vereisen, met name voor diodelasers ofvezellaserbronnenVoordat u een laser uitlijnt, moet u bekend zijn met de veiligheidsprocedures voor lasers en ervoor zorgen dat u een veiligheidsbril draagt die laserstraling blokkeert. Daarnaast kunnen voor onzichtbare lasers detectiekaarten nodig zijn om de uitlijning te vergemakkelijken.
In delaseruitlijningDe hoek en positie van de lichtbundel moeten gelijktijdig worden geregeld. Dit kan het gebruik van meerdere optieken vereisen, de uitlijningsinstellingen complexer maken en veel bureauruimte in beslag nemen. Met kinematische montagesystemen is echter een eenvoudige en effectieve oplossing mogelijk, met name voor toepassingen met beperkte ruimte.
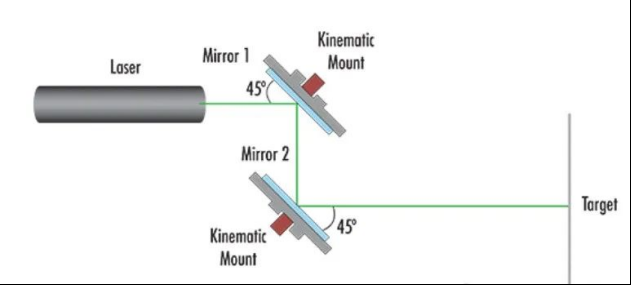
Figuur 1: Parallelle (Z-vouw) structuur
Figuur 1 toont de basisopstelling van de Z-Fold-structuur en de reden voor de naam. De twee spiegels, gemonteerd op twee kinematische steunen, worden gebruikt voor hoekverplaatsing en zijn zo gepositioneerd dat de invallende lichtbundel het spiegeloppervlak van elke spiegel onder dezelfde hoek raakt. Om de opstelling te vereenvoudigen, worden de twee spiegels onder een hoek van ongeveer 45° geplaatst. In deze opstelling wordt de eerste kinematische steun gebruikt om de gewenste verticale en horizontale positie van de bundel te verkrijgen, terwijl de tweede steun de hoek compenseert. De Z-Fold-structuur is de voorkeursmethode voor het richten van meerdere laserbundels op hetzelfde doel. Bij het combineren van lasers met verschillende golflengten kan het nodig zijn om een of meer spiegels te vervangen door dichroïsche filters.
Om dubbel werk tijdens het uitlijnproces te minimaliseren, kan de laser op twee afzonderlijke referentiepunten worden uitgelijnd. Een eenvoudig kruisdraadje of een wit kaartje met een X erop zijn hierbij erg handig. Stel eerst het eerste referentiepunt in op of nabij het oppervlak van spiegel 2, zo dicht mogelijk bij het doel. Het tweede referentiepunt is het doel zelf. Gebruik de eerste kinematische standaard om de horizontale (X) en verticale (Y) positie van de laserstraal bij het eerste referentiepunt aan te passen, zodat deze overeenkomt met de gewenste positie van het doel. Zodra deze positie is bereikt, wordt een tweede kinematische beugel gebruikt om de hoekafwijking aan te passen en de laserstraal op het daadwerkelijke doel te richten. De eerste spiegel wordt gebruikt om de gewenste uitlijning bij benadering te bepalen, terwijl de tweede spiegel wordt gebruikt om de uitlijning van het tweede referentiepunt of doel nauwkeurig af te stellen.
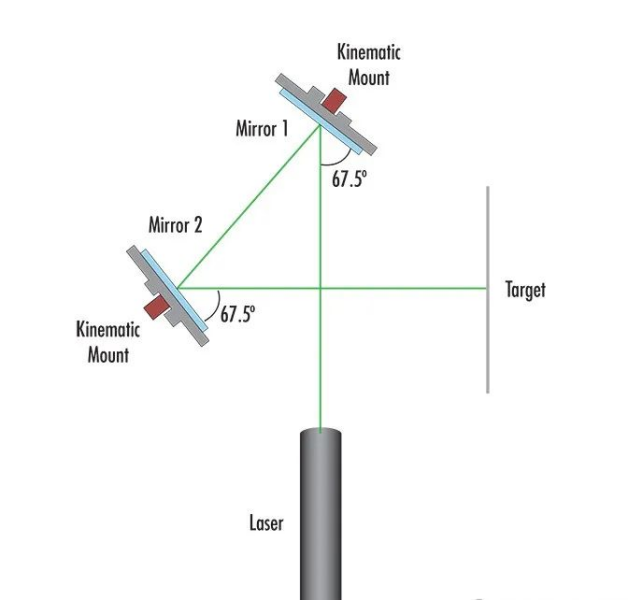
Figuur 2: Verticale (Figuur-4) structuur
De figuur-4-structuur is complexer dan de Z-Fold, maar kan een compactere systeemopstelling bieden. Net als de Z-Fold-structuur maakt de figuur-4-opstelling gebruik van twee spiegels die op beweegbare beugels zijn gemonteerd. In tegenstelling tot de Z-Fold-structuur is de spiegel echter onder een hoek van 67,5° gemonteerd, waardoor een "4"-vorm ontstaat met de laserstraal (Figuur 2). Deze opstelling maakt het mogelijk om reflector 2 buiten het pad van de laserbron te plaatsen. Net als bij de Z-Fold-configuratie,laserstraalDe laser moet worden uitgelijnd op twee referentiepunten: het eerste referentiepunt bij spiegel 2 en het tweede bij het doel. De eerste kinematische beugel wordt gebruikt om het laserpunt naar de gewenste XY-positie op het oppervlak van de tweede spiegel te verplaatsen. Vervolgens moet een tweede kinematische beugel worden gebruikt om hoekafwijkingen te compenseren en de uitlijning op het doel nauwkeurig af te stellen.
Ongeacht welke van de twee configuraties wordt gebruikt, zou het volgen van bovenstaande procedure het aantal benodigde iteraties om het gewenste resultaat te bereiken moeten minimaliseren. Met de juiste gereedschappen en apparatuur en een paar eenvoudige tips kan laseruitlijning aanzienlijk worden vereenvoudigd.
Geplaatst op: 11 maart 2024